Аксиомы статики

Условие применения аксиом
Аксиомы статики – это основные законы и правила, которые применяют при преобразовании систем сил в эквивалентные системы. Такие преобразования не меняют уравнений движения абсолютно твердых тел. Поэтому они позволяют перейти от исходной системы сил к более простой, под действием которой механическая система будет совершать такое же движение, как и при действии на нее исходной системы. Аксиомы статики применяются не только при рассмотрении неподвижных состояний тел, но и во многих других задачах теоретической механики, связанными с силовыми воздействиями. Условием их применения является условие отсутствия деформаций в телах, или малость деформаций по сравнению с размерами механической системы. При таком приближении все тела рассматриваются как абсолютно твердые. В тех задачах, в которых тела нельзя считать абсолютно твердыми, например, при рассмотрении деформаций, аксиомы статики применять нельзя.
С точки зрения логики изложения материала, было бы естественным сначала изучить основы динамики материальных тел, а уже затем изучать статику в качестве одного из ее подразделов – как частный случай движения с нулевой скоростью. Однако, в силу особой важности и большого числа задач, в которых применяются законы статики, ее часто изучают в самом начале как особую дисциплину. При этом основные правила статики излагают в виде аксиом – то есть положений, принятых без доказательств. Часть аксиом действительно являются фундаментальными законами механики, установленными в результате обобщения экспериментальных данных (аксиомы 1 и 5). Остальные являются следствиями уравнений движения твердых тел.
Аксиомы статики
1. Аксиома инерции (закон инерции Галилея)
Существуют такие системы отсчета, в которых любая материальная точка, не взаимодействующая с другими телами и точками, движется прямолинейно и равномерно. В частности, если тело покоилось в определенный момент времени, то оно будет покоиться и в последующие моменты.
Такие системы отсчета называются инерциальными. В механике, если это особо не оговорено, под системой отсчета подразумевается именно инерциальная система отсчета.
2. Аксиома равновесия двух сил
Две силы, приложенные к абсолютно твердому телу, являются уравновешенными тогда и только тогда, когда они равны по модулю, направлены в противоположные стороны и их линии действия совпадают.
3. Аксиома присоединения и исключения уравновешивающихся сил
Кинематическое состояние твердого тела не изменится, если к действующей на него системе сил прибавить или отнять уравновешенную систему сил.
То есть, прибавляя или исключая уравновешенную систему сил, мы получаем эквивалентную систему сил.
Следствие аксиом 2 и 3
Действие силы на твердое тело не изменится, если точку приложения силы перенести вдоль ее линии действия. То есть сила, приложенная к твердому телу, является скользящим вектором. Доказательство ⇓
4. Аксиома параллелограмма сил
Две силы, приложенные к телу в одной точке, можно заменить их равнодействующей силой, равной векторной сумме этих сил и приложенной к той же точке.
Верно и обратное. Любую силу можно разложить на две (и более) силы по правилу векторной суммы (по правилу параллелограмма), приложенных в той же точке, что и исходная сила.
То есть, если силы и приложены в одной точке, то их можно заменить равнодействующей , приложенной к той же точке. Сумму векторов можно найти двумя способами.
1) Можно вычислить проекции сил на оси прямоугольной системы координат:
.
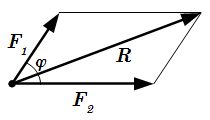
2) Можно сложить векторы по правилу параллелограмма (см. рисунок).
;
.
Здесь – угол между векторами и . Точкой обозначено скалярное произведение векторов.
5. Аксиома равенства действия и противодействия (3-й закон Ньютона)
Если материальная точка 1 действует на материальную точку 2 силой , то и материальная точка 2 действует на материальную точку 1 силой , равной по абсолютной величине силе и противоположно направленной ей: . При этом силы и приложены к взаимодействующим точкам и их линии действия совпадают с прямой, проведенной через эти точки.
Если две взаимодействующие точки принадлежат одному твердому телу, то их силы взаимодействия друг с другом образуют уравновешенную систему сил и, согласно аксиоме 3, могут быть исключены из рассмотрения. Однако, если эти точки принадлежат разным телам, то они не образуют уравновешенной системы. Поэтому исключать такое взаимодействие нельзя.
Аксиома равенства действия и противодействия относится только к материальным точкам. Но в несколько ином виде, она применима и к твердым телам. Взаимодействие тел можно представить как взаимодействие между материальными точками, из которых состоят тела. Тогда все силы, которые действуют на точки тела 2 со стороны точек тела 1, можно привести к равнодействующей , приложенной к некоторому центру O, и паре с моментом . Тогда и все силы, которые действуют на точки тела 1 со стороны точек тела 2, можно привести к равнодействующей , приложенной к той же точке O, и паре с моментом .
6. Принцип отвердевания
Если деформируемое тело находится в равновесии, то его равновесие не нарушится, если тело считать абсолютно твердым.
Принцип отвердевания указывает, что если конструкция, состоящая из подвижных частей, находится в равновесии (то есть скорости всех ее точек относительно некоторой инерциальной системы отсчета равны нулю), то уравнения равновесия можно применять ко всей конструкции в целом, считая ее единым твердым телом. Этот принцип является следствием предыдущих аксиом.
Аксиома связей (принцип освобождаемости от связей)
Всякое несвободное тело можно рассматривать как свободное, если действие связей заменить силами, называемыми силами реакций связей.
Более подробно аксиома связей рассмотрена на странице Аксиома связей
Применение аксиом к решению задач
Наиболее эффективные способы решения задач статики основаны на применении уравнений равновесия. Однако, такие задачи можно решать, применяя только аксиомы. В некоторых случаях это даже является преимуществом, поскольку такое решение является графическим. Далее мы приводим правила, основанные на аксиомах статики, применяемые при решении задач графическим способом.
При графическом решении задач статики, исходную систему сил заменяют эквивалентной, применяя следующие действия.
- К системе сил можно добавить или удалить две силы, равные по абсолютной величине и противоположные по направлению, точки приложения которых совпадают или расположены на линии действия сил.
- Точку приложения любой силы можно перемещать вдоль ее линии действия.
- Две силы, приложенные к одной точке можно заменить силой, равной их векторной сумме, приложенной к той же точке. То есть сложить силы по правилу параллелограмма.
- Любую силу можно разложить на две силы по правилу параллелограмма, приложенных к той же точке, как у исходной силы. То есть можно заменить исходную силу на векторную сумму .
Далее мы рассмотрим пример решения задачи с помощью аксиом статики.
Задача
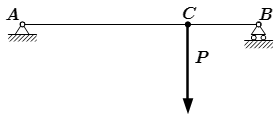
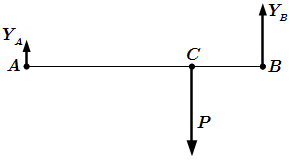
Применяя аксиомы статики, найти графическим способом реакции опор балки AB, на которую действует сила , приложенная в точке C.
Дано: P = 55 kH, AB = 10 м, AC = 7 м, BC = 3 м.
Решение
1. Преобразуем силу в эквивалентную систему сил.
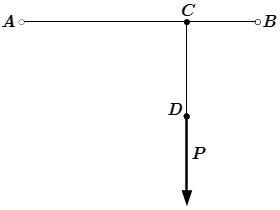
1.1. Перемещаем точку приложения силы P, вдоль линии ее действия, в точку D. Положение точки D выбираем произвольно.
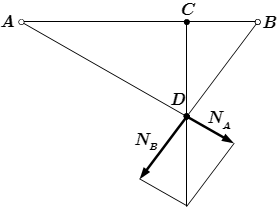
1.2. Проводим отрезки AD и BD. На их продолжениях строим параллелограмм сил . То есть раскладываем силу на две составляющие и , направленные вдоль отрезков.
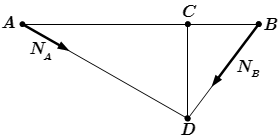
1.3. Перемещаем точки приложения сил и вдоль линий их действия в точки A и B, соответственно.
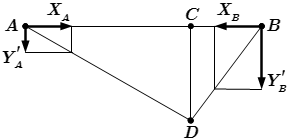
1.4. Раскладываем каждую из сил и на две составляющие – горизонтальную и вертикальную:
;
.
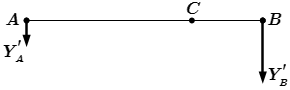
1.5. Силы и являются уравновешенными, поскольку они равны по абсолютной величине, направлены в противоположные стороны и их точки приложения расположены на линии действия сил. Исключаем их из системы сил. Получаем систему, эквивалентную одной силе , приложенной в точке C (см. рис. 1).
2. Преобразования уравновешенной системы сил.
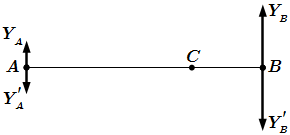
2.1. Добавим к системе, изображенной на рисунке 6, в точках A и B силы и , равные по абсолютной величине силам и и противоположные им по направлению. В результате получим систему взаимно уравновешивающихся сил. То есть под действием такой системы, балка находится в равновесии.
2.2. Заменим силы и эквивалентной им силой . В результате получим уравновешенную систему, соответствующую решению задачи. Измеряя длины векторов и , находим значения соответствующих им сил.
В нашем случае, мы выбрали длину вектора силы , равной 55 мм. Тогда масштаб сил на рисунке составляет кН/мм. Измеряем длины векторов и :
, .
Умножая на масштаб, получаем абсолютные значения реакций опор балки:
, .
Выполняя решение графическим способом, мы получили небольшую погрешность. Но нашей целью было наглядно продемонстрировать применение аксиом статики к решению задач.
Ответ
Итоговая уравновешенная система сил показана на рисунке 8,
, .
Доказательство следствия аксиом 2 и 3
Докажем, что из аксиом 2 ⇑ и 3 ⇑ следует, что точку приложения силы можно перемещать вдоль линии ее действия.
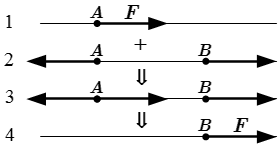
1. Пусть мы имеем вектор силы , приложенный в точке A (см. рисунок).
2. В точках A и B, расположенных на линии действия силы , приложим силы, противоположные по направлению, и равные по величине F. Согласно аксиоме 2, они образуют уравновешенную систему сил.
3. К системе сил 1 прибавим систему 2. Поскольку система 2 является уравновешенной, то согласно аксиоме 3, полученная система сил 3 эквивалентна системе 1.
4. Замечаем, что силы, приложенные в точке A равны по величине и противоположны по направлению. Поэтому, согласно аксиоме 2, они образуют уравновешенную систему. Исключим эту систему, следуя аксиоме 3. В результате получим систему 4, которая отличается от 1 тем, что точка приложения силы переместилась в точку B, расположенной на линии действия этой силы.
Следствие доказано.
Использованная литература:
А. А. Яблонский, В.М. Никифорова. Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
Г. Н. Яковенко. Краткий курс теоретической механики. Москва, 2005.
Автор: Олег Одинцов. Опубликовано: Изменено: