Основные понятия и определения статики

Определение статики
- Статика
- – это раздел теоретической механики, в котором изучаются условия равновесия материальных тел, находящихся под действием сил, а также методы преобразования сил в эквивалентные системы для упрощения расчетов.
Собственно условия равновесия твердого тела представляют собой систему векторных уравнений:
векторная сумма сил, приложенных к телу равна нулю:
(1) Σk →Fk = 0 ;
векторная сумма моментов этих сил относительно произвольного неподвижного центра O равна нулю:
(2) Σk →MO (→Fk ) = 0 .
Нередко приложенные к телу силы распределены таким образом, что исследование этих уравнений представляет собой довольно громоздкую задачу. Например силы, возникающие в следствие земного притяжения, распределены по всем точкам тела пропорционально их массам. Для исследования приведенных выше уравнений нам пришлось бы учитывать бесконечное их число, действующих на каждую частицу тела. Но решение этой задачи можно упростить, если вместо реальных сил тяжести ввести расчетный вектор, равный сумме сил тяжести отдельных его частей, приложенный к центру масс. При этом мы заменим бесконечное число сил одной расчетной силой тяжести и получим, как говорят, эквивалентную систему сил. Суть такой замены состоит в том, что она позволяет упростить расчеты, не изменяя решений уравнений (1) и (2).
Таким образом, основной задачей статики является установление законов преобразования системы сил в эквивалентные системы с целью упрощения расчетов для решений уравнений равновесия.
Методы статики применяются не только для изучения неподвижных тел, но и для движущихся. Это связано с тем, что если заменить исходную систему сил на эквивалентную, то законы движения тела, или как говорят, кинематическое состояние тела, от этого не изменится. Поэтому методы статики применяются к любым механическим системам, состоящих из точек и твердых тел независимо от того, покоятся они или совершают движение. Эти методы позволяют привести исходную систему сил к эквивалентной с целью упрощения расчетов. Таким образом силы в статике и в теоретической механике являются чисто расчетными величинами. Они могут отличаться от реальных сил, действующих на тела, которые применяются в физике или теории упругости. Все эти методы применяются только к абсолютно твердым телам, пренебрегая возможными деформациями внутри самих тел.
Определения тел
- Материальное тело
- – это некоторое количество вещества, которое заполняет какой-нибудь объем в пространстве и имеет границу.
Заметим, что под это определение подходит и твердое тело, и жидкость, и газ, заключенный в определенный объем.
- Материальная точка
- – это материальное тело, обладающее массой, но размерами которого, в данных условиях, можно пренебречь.
Понятие материальной точки является моделью или упрощением. В одних задачах тело можно считать материальной точкой. В других задачах – это же тело считать точкой нельзя. Например, при изучении движения Земли вокруг Солнца, Землю, и Солнце можно считать материальными точками. Но в задачах, связанных с выведением спутников на орбиту, пренебрегать размерами Земли и строением ее атмосферы уже нельзя.
Положение материальной точки полностью описывается ее тремя координатами x, y, z , которые образуют некоторый вектор →r , проведенный из начала O заранее выбранной прямоугольной системы координат Oxyz в точку с координатами (x, y, z ) .
- Твердое тело
- или абсолютно твердое тело – это материальное тело, в котором расстояния между любыми точками остаются неизменными, даже при воздействии любых сил.
В статике и теоретической механике, если это особо не оговорено, все тела считаются абсолютно твердыми. Исключение составляют пружины. Но теоретическая механика не изучает состояние их деформации, а лишь использует законы (в частности закон Гука), установленные методами теории упругости и смежных наук.
- Механическая система
- – это совокупность взаимодействующих между собой материальных тел, в котором положение и движение каждого тела зависят от положения и движения других материальных тел этой системы.
Кинематическое состояние
- Состояние покоя
- – это состояние тела, при котором скорости всех его точек, относительно выбранной системы координат, равны нулю. При этом координаты всех точек имеют постоянные, не зависящие от времени значения.
- Состояние движения тела
- – это состояние тела, при котором существуют его точки, которые движутся относительно выбранной системы координат с отличной от нуля скоростью.
- Кинематическое состояние тела
- – это состояние покоя или движения. Два кинематических состояния тела считаются одинаковыми или равными, если закон движения любой точки в первом кинематическом состоянии совпадает с законом движения той же точки во втором состоянии.
Механическое воздействие
- Механическое воздействие одного тела на другое
- – это такое воздействие, в результате которого могут происходить изменения скоростей точек тел без изменения их химического состава. Механическое воздействие может происходить при соприкосновении тел или на расстоянии – в результате действия электромагнитных или гравитационных полей.
- Сила
- – это мера механического воздействия тел, в результате которого свободное тело получает ускорение относительно инерциальной системы отсчета.
Действие силы на тело определяется двумя векторами – собственно вектором силы →F и точкой приложения A этой силы к телу. Точку приложения A также можно представить вектором OA , проведенным из начала отсчета O системы координат в точку A . В прямоугольной системе координат Oxyz , вектор →F задается тремя проекциями (Fx , Fy , Fz ) силы на оси координат. Как и всякий вектор, он имеет модуль | →F | = √ F 2x + F 2y + F 2z и направление. Вектор OA также имеет модуль и направление. Но они зависят от выбора системы координат, поэтому особого физического смысла не имеют. В то время, как модуль силы | →F | определяет интенсивность механического воздействия и не зависит от выбора системы координат. Направление вектора силы относительно тела также не зависит от выбора системы отсчета.
Обычно силу обозначают как вектор →F . Но вектор в математике – это три числа: его проекции на оси системы координат (Fx , Fy , Fz ) . В теоретической механике важное значение имеет точка приложения силы. Поэтому под силой обычно подразумевают два вектора – саму силу →F(Fx , Fy , Fz ) , и точку ее приложения OM(xA , yA , zA ) .
- Линия действия силы
- – это прямая, параллельная вектору силы, проходящая через ее точку приложения.
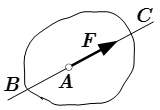
На рисунке прямая BC – это линия действия силы F , приложенной в точке A . В статике, точку приложения силы можно перемещать вдоль ее линии действия, поскольку такое преобразование не меняет уравнений равновесия. А вот при изучении деформаций, перемещать точку приложения нельзя. В связи с этим вводят следующие определения.
- Связанный вектор
- – это вектор, приложенный к определенной точке и не допускающий переноса в другие точки.
- Скользящий вектор
- – это вектор, точку приложения которого можно перемещать вдоль линии его действия.
- Свободный вектор
- – это вектор, точку приложения которого можно помещать в любую точку пространства.
Такм образом, если мы изучаем деформации в теле, то все приложенные к нему силы являются связанными векторами.
Но в задачах теоретической механики, мы изучаем скорости движения тел, считая их твердыми. Перемещение точки приложения силы вдоль линии ее действия не меняет уравнений движения. Поэтому силы в теоретической механике являются скользящими векторами.
Момент пары сил и угловая скорость вращения тела являются примерами свободных векторов.
Системы сил
- Система сил
- – это совокупность нескольких сил, действующих на данное тело или систему тел.
- Эквивалентные системы сил
- – это системы сил, под действием которых твердое тело находится в одинаковых кинематических состояниях ⇑.
- Равнодействующая сила
- – это сила, эквивалентная некоторой системе сил.
- Система взаимно уравновешивающихся сил
- – это система сил, которая не меняет кинематическое состояние ⇑ тела.
- Внешние силы
- Внешние силы, действующие на механическую систему – это силы, действующие на тела рассматриваемой системы со стороны тел, не входящих в эту систему.
- Внутренние силы
- Внутренние силы, действующие на механическую систему – это силы, действующие на тела рассматриваемой системы со стороны тел, входящих в эту систему.
Например, если в качестве механической системы мы возьмем стол с лежащей на нем книгой, то силы тяжести, действующие на оба тела и сила давления поверхности пола на стол, являются внешними силами. А сила давления книги на стол и сила давления стола на книгу будут внутренними.
Использованная литература:
А. А. Яблонский, В.М. Никифорова, Курс теоретической механики, часть 1, статика, кинематика. Москва, «Высшая школа», 1966.
Автор: Олег Одинцов. Опубликовано: