Основные типы связей и их реакции, применяемые в технической механике

Здесь мы рассмотрим наиболее простые виды связей, широко используемые в технической механике, применяющиеся при проектировании различных машин и механизмов. Их действие заключаются в ограничении перемещения и (или) поворота тел вдоль определенных направлений. Математически это выражается в том, что соответствующие этим перемещениям координаты имеют фиксированные значения. В технической механике связи широко используются для закрепления элементов системы на неподвижных опорах, а также для соединения узлов составных конструкций между собой.
В более общем виде связи изучаются в разделе аналитической механики курса теоретической механики. Здесь же мы ограничимся их наиболее простыми видами, но имеющими широкое применение.
Замена связей реакциями
В технической механике, при проектировании машин и механизмов, возникает потребность в креплении тел к опорам и соединении отдельных элементов конструкций между собой. Это осуществляется с помощью различных узлов, которые ограничивают перемещения тел друг относительно друга. Такие ограничения называются связями.
К основным видам связей относятся: поверхности; нити, тросы, цепи (гибкая связь), невесомые (легкие) стержни; неподвижные и подвижные шарниры; подвижные опоры (на катках); ползуны; жесткие, скользящие и бискользящие заделки; сферические шарниры; подпятники; цилиндрические шарниры (петли).
Для определения усилий, возникающих в местах соединений, применяется аксиома связей. Для этого мы вначале отбрасываем связи. То есть, считаем, что крепления в местах соединений тел отсутствуют. Далее вместо креплений вводим силы, которые называются реакциями связей. Это могут быть как силы, так и пары сил (моменты). Направления реакций могут зависеть как от типа используемой связи, так и от внешних сил, приложенных к конструкции. Величины реакций определяются расчетным путем. Они должны быть такими, чтобы, после замены связей на силы, механические свойства системы были эквивалентны механическим свойствам исходной системы. То есть, если тело покоится, то оно должно покоиться и после замены связей реакциями. А если тело движется по определенному закону, то, после замены связей реакциями, оно должно двигаться по тому же закону.
Конструкция самой связи накладывает определенное ограничение на возможные направления сил реакций, которые направлены противоположно направлению, в котором происходит препятствие перемещению точки тела, соединенной связью. А если есть препятствие повороту, то реакция включает момент силы, направленный противоположно направлению, в котором происходит препятствие повороту. Тогда если в определенном направлении связь не препятствует перемещению тела, то компонента силы реакции в этом направлении отсутствует.
Основные типы связей и их реакции
Для одних связей, реакции состоят из одной силы, действующей вдоль фиксированного направления. Для других – это может быть сила на плоскости; пара сил (момент); сила с произвольным направлением; сила и момент; и т.п. Далее следует перечень основных типов связей с указанием видов их реакций. Здесь мы не рассматриваем силы трения, считая их пренебрежимо малыми величинами. Если это не так, то их следует ввести дополнительно.
Сначала мы рассмотрим связи, применяемые в плоских задачах, а затем некоторые типы, широко используемых в пространственных задачах.
Плоские задачи
Две гладкие не острые поверхности
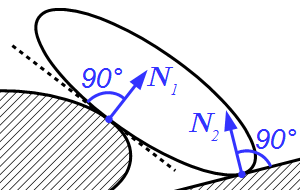
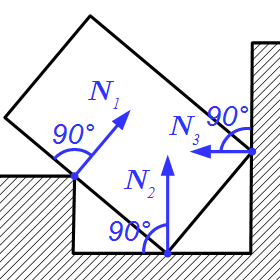
Если тела прижаты друг к другу, то перемещение возможно только в касательной плоскости, проведенной через точку соприкосновения поверхностей. В направлении перпендикулярном этой плоскости, перемещение не возможно. Через точку соприкосновения проводим касательную плоскость к поверхностям. Реакция является силой, приложенной в точке соприкосновения, и направленной перпендикулярно этой плоскости, то есть, по нормали к обеим поверхностям в точке их соприкосновения.
Одна из гладких поверхностей является острием
Здесь также как и для гладких поверхностей, перемещение острия возможно только в касательной плоскости, проведенной через точку соприкосновения тел (если тела прижаты друг к другу). Реакция является силой, направленной вдоль нормали не острой поверхности в точке соприкосновения.
Две шероховатые поверхности
То же самое, что и для гладких поверхностей, только в точке соприкосновения добавляем силу трения, лежащую в плоскости касания.
Гибкая связь (невесомая нить, трос, цепь)
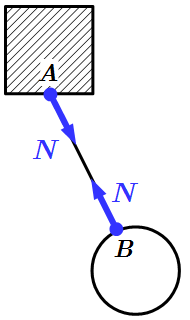
Нерастяжимая нить, закрепленная в неподвижной точке подвеса A, препятствует перемещению второго конца B в направлении . При натянутой нити, перемещение конца B возможно только в направлении, перпендикулярном нити. Поэтому реакция является силой, направленной вдоль нити к противоположному концу. Поскольку нить гибкая, то конец B может перемещаться к точке подвеса A. Поэтому на нить всегда действует сила растяжения. На нить не может действовать сила сжатия.
Сила, действующая на точку подвеса A равна по величине и противоположна по направлению силе, действующей на другой конец нити B.
- Шарнир
- – это связь, соединяющая две точки, принадлежащие разным телам, но позволяющая им вращаться друг относительно друга. Математически это означает, что две точки, принадлежащие разным телам, имеют равные координаты. Шарнир обозначается полым кружочком.
Невесомый абсолютно жесткий стержень
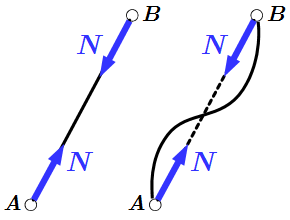
Под невесомым стержнем понимается прямолинейный элемент конструкции, оба конца которого закреплены шарнирами (A и B), и на который не действуют внешние силы. Относительное перемещение любого конца возможно только в направлении, перпендикулярном стержню. Перемещение любого конца относительно другого параллельно стержню не возможно. Стержень может быть как натянутым, так и сжатым. Реакция направлена вдоль прямой, соединяющей его концы. При этом на стержень, в отличие от нити, может действовать как растягивающая, так и сжимающая сила. Сила, действующая со стороны стержня на шарнир B равна по величине и противоположна по направлению силе, действующей на шарнир A.
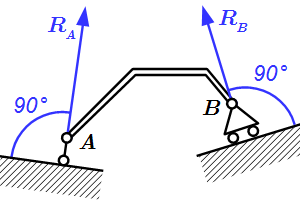
Также стержень может быть изогнутым. Важно при этом, чтобы он был жестким, его концы были шарнирами, и чтобы действовавшие на него внешние силы, включая силу тяжести, были пренебрежимо малы. Тогда реакции в шарнирах являются силами, направленными вдоль прямой, соединяющей концы стержня (см. рисунок выше).
Неподвижный шарнир
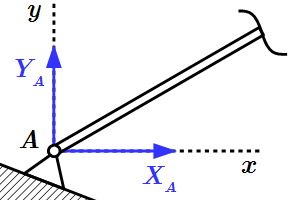
Точка крепления опоры (A) не может перемещаться ни в каком направлении. При этом тело может свободно поворачиваться в этой точке. Реакция связи неподвижного шарнира является силой, проходящей через ось шарнира, и имеющей произвольное направление. Обычно ее раскладывают на две составляющие параллельно осям координат.
Подвижный шарнир, или опора на катках
Точка крепления опоры может свободно скользить вдоль опорной поверхности. Перемещение в перпендикулярном направлении невозможно. Также возможен свободный поворот в точке крепления. Реакция связи подвижного шарнира является силой, которая проходит через ось шарнира перпендикулярно опорной поверхности.
Ползун на стержне
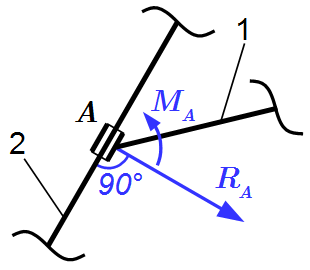
Ползун A, жестко закрепленный с телом 1, может скользить вдоль стержня 2. При этом угол между телом и стержнем остается неизменным. Таким образом, ползун препятствует перемещению тела в направлении, перпендикулярном стержню, и препятствует повороту тела относительно стержня. Поэтому реакция состоит из силы , направленной перпендикулярно стержню и момента , направленному перпендикулярно плоскости фигуры.
Ползун в направляющих
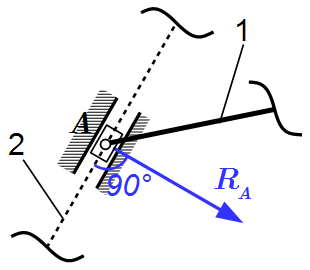
Тело 1 прикреплено шарниром к ползуну A, который может скользить вдоль направляющих 2. При этом угол между телом и направляющими может изменяться. Таким образом, ползун препятствует перемещению тела в направлении, перпендикулярном направляющим, и не препятствует повороту тела. Поэтому реакция состоит только из силы , направленной перпендикулярно стержню.
Если же тело жестко связано с ползуном, то угол между телом и направляющими будет неизменным. В таком случае ползун также препятствует повороту тела относительно направляющих. Поэтому в состав реакции войдет момент, направленный перпендикулярно плоскости фигуры, как и в случае с ползуном на стержне.
Жесткая заделка
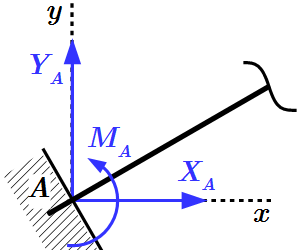
Здесь тело и опора слиты воедино и, по сути, являются одним телом. Точка крепления опоры не может перемещаться, и тело не может поворачиваться в этой точке. Реакция связи состоит из силы и момента. Сила может иметь любое направление, и ее обычно раскладывают на две составляющие параллельно осям координат. Для плоской задачи, момент (пара сил) направлен перпендикулярно плоскости фигуры, а в трехмерном случае имеет произвольное направление.
Скользящая заделка
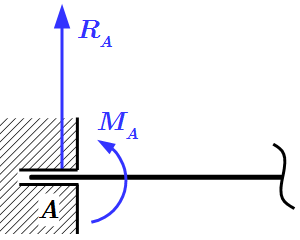
В отличие от жесткой заделки, здесь точка крепления опоры может перемещаться (скользить) в одном направлении – по направляющей скользящей заделки. Реакция связи состоит из силы и момента. Сила проходит через точку соединения тела с опорой и направлена перпендикулярно направляющей. Момент направлен перпендикулярно плоскости фигуры.
Бискользящая заделка
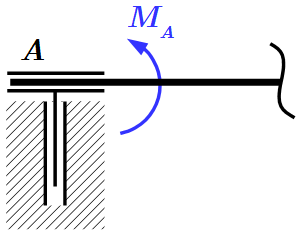
Здесь точка крепления опоры может перемещаться (скользить) в любом направлении. При этом тело не может поворачиваться относительно точки крепления опоры. Реакция связи состоит только из момента (пары сил), который направлен перпендикулярно плоскости фигуры.
Пространственные задачи
К пространственным задачам также относятся поверхности, нити и стержни, описанные ранее. Здесь мы укажем те типы связей, которые имеют широкое распространение и специфическое название.
Цилиндрический шарнир или петля
Реакция связи цилиндрического шарнира является силой, проходящей через ось шарнира, перпендикулярно направлению его оси. То есть вектор силы реакции цилиндрического шарнира может иметь любое направление в плоскости, перпендикулярной оси. Обычно ее раскладывают на две составляющие, лежащие в этой плоскости.
Подпятник или радиально-упорный подшипник
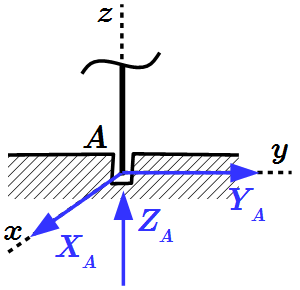
Это цилиндрический шарнир с упором. Как и цилиндрический шарнир, он препятствует перемещению тела перпендикулярно оси подшипника. Кроме этого он снабжен упором, который препятствует перемещению тела в направлении упора параллельно оси. При этом возможен поворот тела относительно точки крепления. Реакция является силой, проходящей через центр подшипника. Она может иметь любое направление, при котором ее проекция на ось подшипника направлена противоположно упору. Обычно ее раскладывают на три составляющие параллельно осям координат.
Сферический подшипник или сферический (шаровой) шарнир
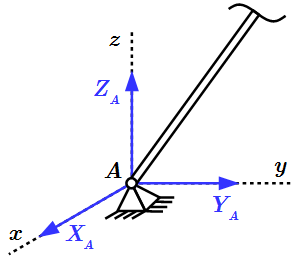
Тело закреплено в одной точке и может свободно поворачиваться вокруг нее. Реакция является силой, проходящей через центр подшипника, и может иметь любое направление. Обычно ее раскладывают на три составляющие параллельно осям координат.
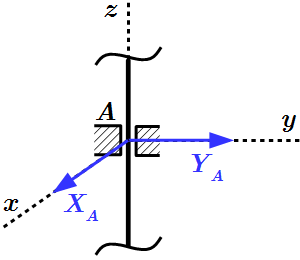
Жесткая заделка
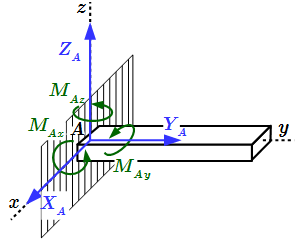
Реакция связи состоит из момента и силы. Сила проходит через точку соединения с опорой. Момент вычисляется относительно этой точки. Силу и момент обычно раскладывают на три составляющие параллельно осям координат.
Автор: Олег Одинцов. Опубликовано: Изменено: