Равнодействующая системы двух параллельных сил

Равнодействующая двух сонаправленных параллельных сил
имеют равнодействующую →R , сонаправленную параллельно →F1 и →F2 . Абсолютная величина равнодействующей равна сумме абсолютных величин сил:
(1.1) R = F1 + F2 .
Линия действия равнодействующей проходит через точку C, которая принадлежит отрезку AB, и делит его обратно пропорционально модулям сил:
(1.2) ACBC = F2 F1
(1.3) | AC | = F2 R ⋅ | AB | ; | BC | = F1 R ⋅ | AB | .
Радиус вектор точки приложения C определяется по формуле
(1.4) →rC = F1 ⋅ →rA + F2 ⋅ →rB F1 + F2 ,
где →rA , →rB – радиус векторы точек A и B.
Доказательство
Доказательство с помощью аксиом статики
Точка C отличается от других возможных точек приложения равнодействующей тем, что ее положение определяется только модулями сил →F1 и →F2 , и не зависит от их направления. Такую точку называют центром параллельных сил.
Равнодействующая двух противоположно направленных параллельных сил
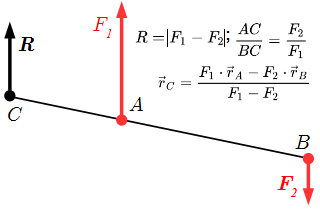
имеют равнодействующую →R , направление которой совпадает с направлением наибольшей по абсолютной величине силы →F1 или →F2 . Абсолютная величина равнодействующей равна модулю разности абсолютных величин сил:
(2.1) R = | F1 – F2 | .
Линия действия равнодействующей проходит через точку C, находящуюся на продолжении отрезка AB, причем:
(2.2) ACBC = F2 F1
(2.3) AC = F2 R ⋅ | AB | ; BC = F1 R ⋅ | AB | .
Радиус вектор точки приложения C определяется по формуле
(2.4) →rC = F1 ⋅ →rA – F2 ⋅ →rB F1 – F2 ,
где →rA , →rB – радиус векторы точек A и B.
Доказательство
Доказательство с помощью аксиом статики
Две равные по абсолютной величине и противоположно направленные силы, линии действия которых не совпадают, не имеют равнодействующей. Такая система называется парой сил и характеризуется моментом.
Наконец, приведем общую формулу равнодействующей, применимую как для сонаправленных, так и противоположно направленных сил →F1 и →F2 .
Общая формула равнодействующей двух параллельных сил
Пусть две параллельные силы →F1 и →F2 приложены к твердому телу в точках A и B, соответственно.И пусть →F1 + →F2 ≠ 0 .
Тогда они имеют равнодействующую
→R = →F1 + →F2 ,
линия действия которой проходит через точку C с радиус вектором
→rC = F1R ⋅ →rA + F2R ⋅ →rB F1R + F2R ,
где F1R = (→F1 ⋅ →R )R , F2R = (→F2 ⋅ →R )R – проекции сил →F1R , →F2R на направление равнодействующей →R ; →rA , →rB – радиус векторы точек A и B (то есть векторы, проведенные из начала системы координат к этим точкам).
Доказательство
Точку приложения равнодействующей, как и сил →F1 и →F2 , можно перемещать вдоль их линий действия. Поэтому в качестве точки приложения равнодействующей →R можно выбрать любую точку C′ с радиус вектором
→rC ′ = →rC + γ→R ,
где γ – произвольная постоянная. Однако такая точка уже не будет центром параллельных сил, поскольку ее положение зависит от направления вектора →R , параллельного силам →F1 и →F2 .
Вывод формул
Определение равнодействующей, используя уравнения статики
Напомним, что равнодействующая – это одна сила, действие которой эквивалентно действию заданной системы сил. То есть законы движения твердого тела должны сохранить свой вид при замене заданной системы сил на равнодействующую. В уравнения движения тела твердого входит только векторная сумма внешних сил и сумма моментов этих сил относительно любой точки. Поэтому, при замене системы сил на равнодействующую, должны выполняться два условия.
1. Векторная сумма внешних сил →Fi должна равняться равнодействующей:
(3.1) →R = Σi →Fi .
2. Сумма моментов внешних сил относительно произвольной точки O должна равняться моменту от равнодействующей силы относительно этой точки:
(3.2) →MO (C, →R ) = Σi →MO (Ai , →Fi ) .
Здесь →MO (C, →R ) – момент равнодействующей →R , приложенной в точке C, относительно точки O; →MO (Ai , →Fi ) – момент силы →Fi , приложенной в точке Ai, относительно точки O. Моменты можно выразить посредством векторного произведения: →MO (Ai , →Fi ) = [→ri × →Fi ] , где →ri – радиус вектор, проведенный из точки O в Ai. Тогда последнее уравнение можно записать так:
(3.3) [→rC × →R ] = Σi [→ri × →Fi ] .
Эквивалентные преобразования сил применяются только для сил, приложенных к абсолютно твердому телу, или к системе тел, которая, согласно принципу отвердевания, может рассматриваться как твердое. Нельзя производить преобразования сил, приложенных к различным точкам и телам, которые могут совершать относительное движение.
Сонаправленные силы
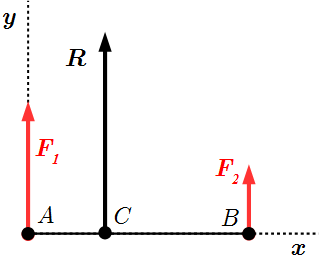
Найдем равнодействующую →R и точку ее приложения C двух параллельных сонаправленных сил →F1 и →F2 , приложенных в точках A и B.
Выберем прямоугольную систему координат Axyz с началом в точке A. Ось Ay направим вдоль направлений сил; ось Az – перпендикулярно плоскости рисунка (на нас). Из точек C и B опустим перпендикуляры CC′ и BB′ на ось Ax.
Вектор равнодействующей определяется по формуле (3.1):
→R = →F1 + →F2 .
Отсюда следует, что он параллелен и сонаправлен силам →F1 и →F2 , и также направлен вдоль оси Ay. Спроектировав это векторное уравнение на эту ось, найдем абсолютную величину равнодействующей:
R = F1 + F2 .
Спроектируем уравнение (3.2) на ось Az.
(4.1) MAz (C, →R ) = MAz (A, →F1 ) + MAz (B, →F2 ) .
Сила →F1 проходит через эту ось. Поэтому ее момент равен нулю: MAz (A, →F1 ) = 0 . Поскольку →R⊥AC ′ и →F2 ⊥AB ′ , то отрезки AC' и AB' будут плечами сил →R и →F2 . Находим их моменты как произведения плеча силы на абсолютное значение:
MAz (C, →R ) = | AC ′ | ⋅ R, MAz (B, →F2 ) = | AB ′ | ⋅ F2 .
Подставляем в (4.1):
| AC ′ | ⋅ R = 0 + | AB ′ | ⋅ F2 ;
| AC ′ | = F2 R ⋅ | AB ′ | .
Поскольку | AC ′ | = | AC | cos α; | AB ′ | = | AB | cos α , где α = BAB ′ , то
| AC | = F2 R ⋅ | AB | .
Получим остальные формулы (1.2) – (1.4).
| BC | = | AB | – | AC | = | AB | RR – F2 R ⋅ | AB | = R – F2 R ⋅ | AB | = F1 R ⋅ | AB | ;
| AC | | BC | = F2 R ⋅ | AB | / F1 R ⋅ | AB | = F2 F1 ;
→rC = →rA + →AC = →rA + | AC | | AB | →AB = RR →rA + F2 R ⋅ (→rB – →rA ) =
(R – F2 ) ⋅ →rA + F2 ⋅ →rB R = F1 ⋅ →rA + F2 ⋅ →rB F1 + F2 .
Противоположно направленные силы
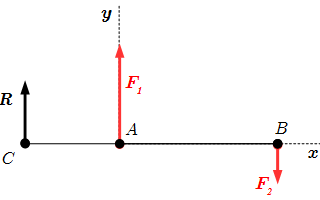
Теперь найдем равнодействующую →R и точку ее приложения C двух параллельных, но противоположно направленных сил →F1 и →F2 (см. рисунок). Будем считать, что F1 > F2 . Также выбираем прямоугольную систему координат Axyz с началом в точке A.
Из формулы (3.1)
→R = →F1 + →F2
следует, что вектор равнодействующей параллелен силам →F1 и →F2 . Спроектировав это векторное уравнение на ось Ay, найдем абсолютную величину равнодействующей:
R = F1 – F2 .
Спроектируем уравнение (3.2) на ось Az.
(5.1) MAz (C, →R ) = MAz (A, →F1 ) + MAz (B, →F2 ) .
Сила →F1 проходит через эту ось. Поэтому ее момент равен нулю: MAz (A, →F1 ) = 0 . Поскольку →R⊥AC ′ и →F2 ⊥AB ′ , то отрезки AC' и AB' будут плечами сил →R и →F2 . Находим их моменты как произведения плеча силы на абсолютное значение. При этом положительному значению соответствует закручивание против часовой стрелки. У нас наоборот. поэтому моменты отрицательные:
MAz (C, →R ) = – | AC ′ | ⋅ R, MAz (B, →F2 ) = – | AB ′ | ⋅ F2 .
Подставляем в (5.1):
– | AC ′ | ⋅ R = 0 – | AB ′ | ⋅ F2 ;
| AC ′ | = F2 R ⋅ | AB ′ | .
Поскольку | AC ′ | = | AC | cos α; | AB ′ | = | AB | cos α , где α = BAB ′ , то
| AC | = F2 R ⋅ | AB | .
Получим остальные формулы (2.2) – (2.4).
| BC | = | AB | + | AC | = | AB | RR + F2 R ⋅ | AB | = R + F2 R ⋅ | AB | = F1 R ⋅ | AB | ;
| AC | | BC | = F2 R ⋅ | AB | / F1 R ⋅ | AB | = F2 F1 ;
→rC = →rA + →AC = →rA + | AC | | AB | →BA = RR →rA + F2 R ⋅ (→rA – →rB ) =
(R + F2 ) ⋅ →rA – F2 ⋅ →rB R = F1 ⋅ →rA – F2 ⋅ →rB F1 – F2 .
Вывод общей формулы
Пусть две параллельные силы →F1 и →F2 приложены к твердому телу в точках A и B. Найдем равнодействующую →R и точку ее приложения C, применяя уравнения (3.1) и (3.3).
Вектор равнодействующей равен сумме векторов сил, действующих на тело:
→R = →F1 + →F2 .
По условию, →F1 + →F2 ≠ 0 . То есть абсолютная величина равнодействующей отлична от нуля: R ≠ 0 .
Найдем точку приложения C равнодействующей →R из уравнения моментов (3.3). Для этого выберем прямоугольную систему координат с началом в произвольной точке O. Тогда момент равнодействующей относительно начала координат O должен равняться сумме моментов сил →F1 и →F2 относительно этой точки:
(6.1) [→rC × →R ] = [→rA × →F1 ] + [→rB × →F2 ] .
Здесь →rA , →rB , →rC – радиус векторы точек A, B и C. То есть векторы, проведенные из начала системы координат O к этим точкам.
При R ≠ 0 можно ввести единичный вектор →nR , направленный вдоль равнодействующей:
→nR = →RR .
Введем проекции векторов →F1 и →F2 на направление →nR :
F1R = (→F1 ⋅ →nR ) = (→F1 ⋅ →R )R ,
F2R = (→F2 ⋅ →nR ) = (→F2 ⋅ →R )R .
Поскольку все силы параллельны, то
F1R = ± F1 , F2R = ± F2 .
Тогда
→F1 = F1R →RR , →F2 = F2R →RR ;
[→rA × →F1 ] + [→rB × →F2 ] = [ →rA × F1R →RR ] + [ →rB × F2R →RR ] =
[ →rA F1R R × →R ] + [ →rB F2R R × →R ] = [ F1R ⋅ →rA + F2R ⋅ →rB R × →R ] .
Подставляем в (6.1).
[→rC × →R ] = [ F1R ⋅ →rA + F2R ⋅ →rB R × →R ] .
Отсюда
(6.2) →rC = F1R ⋅ →rA + F2R ⋅ →rB R + γ→R ,
где γ – произвольная постоянная.
Формула (6.2) определяет линию действия равнодействующей. При γ = 0 получаем:
(6.3) →rC = F1R ⋅ →rA + F2R ⋅ →rB R .
Покажем, что →rC из (6.3) определяет точку в пространстве. Для этого нужно доказать, что →rC является радиус-вектором (см. Что такое радиус-вектор).
1. Поскольку →rC равен сумме векторов →rA и →rB , умноженных на постоянные коэффициенты, то →rC является вектором.
2. Выполним параллельный перенос системы координат. Пусть ее начало переместится из точки O в O′. Тогда компоненты всех радиус-векторов преобразуются по одному закону:
→rA = →OO ′ + →r ′A ;
→rB = →OO ′ + →r ′B .
Покажем, что и →rC преобразуется по этому закону:
→rC = F1R ⋅ →rA + F2R ⋅ →rB R = F1R (→OO ′ + →r ′A ) + F2R (→OO ′ + →r ′B )R =
→OO ′ ⋅ F1R + F2R R + F1R ⋅ →r ′A + F2R ⋅ →r ′BR = →OO ′ ⋅ RR + →r ′C = →OO ′ + →r ′C ;
→rC = →OO ′ + →r ′C .
→rC также преобразуется по этому закону. Поэтому является радиус-вектором, то есть определяет положение точки в пространстве.
Доказательства с помощью аксиом статики
Теперь найдем равнодействующую, используя аксиомы статики. Суть аксиом заключается в том, что силы, приложенные к твердому телу, являются скользящими векторами. То есть силы, приложенные к одной точке можно складывать по правилу параллелограмма, и точку приложения силы можно перемещать вдоль ее линии действия.
Мы сразу можем упростить задачу, если переместим точки приложения A и B сил →F1 , →F2 так, чтобы прямая, проходящая через точки приложения была перпендикулярна направлению сил: AB⊥→F1 . После того как мы найдем точку приложения C равнодействующей →R , мы также можем переместить ее вдоль линии действия равнодействующей. В результате все формулы, полученные для случая AB⊥→F1 , будут применимы и для произвольно расположенных точек A и B.
Две силы одного направления
1. Переместим точки приложения параллельных сил →F1 и →F2 вдоль их линий действия в точки A и B так, чтобы AB⊥→F1 .
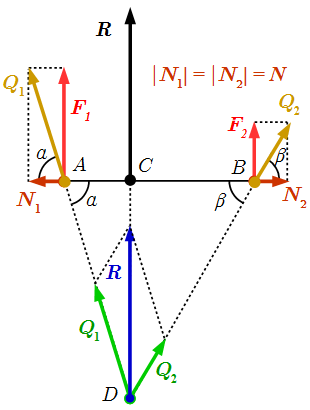
2. Добавим систему взаимно уравновешивающихся сил →N1 и →N2 , приложенных к точкам A и B. Они равны по абсолютной величине, противоположны по направлению, и их линии действия совпадают с прямой AB. В результате получим эквивалентную систему сил, состоящую из →F1 , →N1 , приложенных к A, и →F2 , →N2 , приложенных к B.
3. Сложим силы →F1 и →N1 по правилу параллелограмма: →Q1 = →F1 + →N1 . Тоже самое проделаем с →F2 и →N2 : →Q2 = →F2 + →N2 . В результате получим эквивалентную систему сил, состоящую из →Q1 и →Q2 , приложенных к точкам A и B, соответственно. Эти силы составляют углы α и β с прямой AB, причем:
(7.1) tg α = F1 / N, tg β = F2 / N ,
где N = N1 = N2 – абсолютная величина сил →N1 и →N2 .
4. Найдем точку D пересечения линий действия сил →Q1 и →Q2 , и перенесем точки приложения этих сил в D. В результате получим эквивалентную систему сил, состоящую из →Q1 и →Q2 , приложенных к точке D.
5. Сложим →Q1 и →Q2 по правилу параллелограмма. В результате получим эквивалентную систему сил, состоящую из одной равнодействующей силы →R . Легко показать, что →R = →F1 + →F2 :
→R = →Q1 + →Q2 = →F1 + →N1 + →F2 + →N2 = →F1 + →N1 + →F2 – →N1 = →F1 + →F2 .
Поскольку силы →F1 и →F2 перпендикулярны AB, то равнодействующая →R также перпендикулярна AB.
6. Наконец, перенесем точку приложения равнодействующей →R вдоль ее линии действия в точку C, чтобы точки A, B и C располагались на одной прямой. Применяя (7.1), из прямоугольников ACD и BCD находим:
| CD | = | AC | tg α = | BC | tg β ;
| AC | ⋅ F1 / N = | BC | ⋅ F2 / N ;
| AC | | BC | = F2 F1 ;
| AC | = | AC | | AB | | AB | = | AC | | AC | + | BC | | AB | = | AC | / | BC | | AC | / | BC | + 1 | AB | =
F2 / F1 F2 / F1 + 1 | AB | = F2 F2 + F1 | AB | = F2 R | AB | ;
| BC | = F1 F2 | AC | = F1 F2 ⋅ F2 R | AB | = F1 R | AB | ;
→rC = →rA + →AC = →rA + | AC | | AB | →AB = RR →rA + F2 R →AB =
F1 + F2 R →rA + F2 R (→rB – →rA ) = F1 →rA + F2 →rB F1 + F2 .
Две противоположно направленные силы
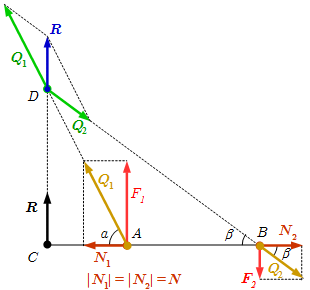
1. Переместим точки приложения сил →F1 и →F2 вдоль их линий действия в точки A и B так, чтобы AB⊥→F1 .
2. Добавим систему взаимно уравновешивающихся сил →N1 и →N2 , приложенных к точкам A и B. Эти силы равны по абсолютной величине, противоположны по направлению и их линии действия совпадают с прямой AB. В результате получим эквивалентную систему сил, состоящую из →F1 , →N1 , приложенных к A, и →F2 , →N2 , приложенных к B.
3. Сложим силы →F1 и →N1 по правилу параллелограмма: →Q1 = →F1 + →N1 . Тоже самое проделаем с →F2 и →N2 : →Q2 = →F2 + →N2 . В результате получим эквивалентную систему сил, состоящую из →Q1 и →Q2 , приложенных к точкам A и B, соответственно. Эти силы составляют углы α, β с прямой AB:
(8.1) tg α = F1 / N, tg β = F2 / N ,
где N = N1 = N2 .
4. Найдем точку D пересечения линий действия сил →Q1 и →Q2 , и перенесем в D точки приложения этих сил. В результате получим эквивалентную систему сил, состоящую из →Q1 и →Q2 , приложенных к точке D.
5. Сложим →Q1 и →Q2 по правилу параллелограмма. В результате получим эквивалентную систему сил, состоящую из одной силы →R . Легко показать, что →R = →F1 + →F2 :
→R = →Q1 + →Q2 = →F1 + →N1 + →F2 + →N2 = →F1 + →N1 + →F2 – →N1 = →F1 + →F2 .
Поскольку силы →F1 и →F2 перпендикулярны AB, то равнодействующая →R также перпендикулярна AB. Если F1 > F2 , то R = F1 – F2 . Если F1 < F2 , то R = F2 – F1 . В общем случае,
R = | F1 – F2 | .
Далее полагаем, что F1 > F2 .
6. Наконец, перенесем точку приложения равнодействующей →R вдоль ее линии действия в точку C, чтобы точки A, B и C располагались на одной прямой. Применяя (8.1), из прямоугольников ACD и BCD находим:
| CD | = | AC | tg α = | BC | tg β ;
| AC | ⋅ F1 / N = | BC | ⋅ F2 / N ;
| AC | | BC | = F2 F1 ;
| AC | = | AC | | AB | | AB | = | AC | | BC | – | AC | | AB | = | AC | / | BC | 1 – | AC | / | BC | | AB | =
F2 / F1 1 – F2 / F1 | AB | = F2 F1 – F2 | AB | = F2 R | AB | ;
| BC | = | BC | | AB | | AB | = | BC | | BC | – | AC | | AB | = 11 – | AC | / | BC | | AB | =
11 – F2 / F1 | AB | = F1 F1 – F2 | AB | = F1 R | AB | ;
→rC = →rA + →AC = →rA + | AC | | AB | →BA = RR →rA + F2 R →BA =
F1 – F2 R →rA + F2 R (→rA – →rB ) = F1 →rA – F2 →rB F1 – F2 .
Автор: Олег Одинцов. Опубликовано: Изменено: