Теорема о движении центра масс системы. Решение задач

Основные законы, применяемые при решении задач
Теорема о движении центра масс
- Центром масс механической системы
- называется точка, радиус-вектор →rC которой определяется по формуле:
(1) →rC = 1m Σk mk →rk .
Здесь →rk – радиус-вектор точки массой mk ; m = Σk mk – масса механической системы.
Дифференцируя (1) по времени, находим.
(2) →vC = .→rC = 1m Σk mk →vk – скорость центра масс системы;
(3) →aC = .→vC = ..→rC = 1m Σk mk →ak – ускорение центра масс системы.
Здесь
→vk = .→rk – скорости точек или центров масс тел;
→ak = .→vk = ..→rk – ускорения точек или центров масс тел.
Произведение массы системы на ускорение ее центра масс равно векторной сумме всех действующих на систему внешних сил:
m ⋅ →aC = Σk →F ek .
Сложное движение точки
Входящие в (2) и (3) скорости и ускорения определяются относительно неподвижной системы отсчета. Часто возникают случаи, когда точки и тела совершают сложное движение. Например, точка движется относительно тела по заданному закону, а тело, в свою очередь, совершает движение относительно неподвижной системы отсчета. В этом случае удобно разбить движение на две составляющие – переносное и относительное. То есть удобно выбрать дополнительную подвижную систему отсчета. Тогда движение точек этой подвижной системы называется переносным, а движение точек относительно нее – относительным.
- Абсолютная скорость (ускорение) точки
- →v (→a ) – это скорость (ускорение) точки в неподвижной системе координат.
- Переносная скорость (ускорение) точки
- →ve (→ae ) – это скорость (ускорение) той точки подвижной системы координат, в которой, в данный момент времени, находится точка, совершающая сложное движение.
- Относительная скорость (ускорение) точки
- →vr (→ar ) – это скорость (ускорение) точки относительно подвижной системы координат.
абсолютная скорость →v и ускорение →a точки выражаются через переносные →ve , →ae и относительные →vr , →ar скорости и ускорения по формулам:
→v = →ve + →vr (теорема о сложении скоростей);
→a = →ae + →ar + →ac (теорема Кориолиса).
Здесь →ac = 2[→ω × →vr ] – кориолисово ускорение; →ω – угловая скорость вращения подвижной системы координат.
Задача. Определение перемещения и реакции плиты с грузами
Условие задачи
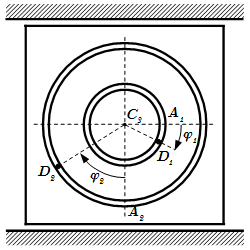
Механическая система состоит из груза D1 массой m1=3 кг и D2 массой m2=6 кг и из прямоугольной вертикальной плиты массой m3=10 кг, движущейся вдоль горизонтальных направляющих. В момент времени t0=0, когда система находилась в покое, под действием внутренних сил грузы начинают двигаться по желобам, представляющим собой окружности радиусов r=0,4 м и R=0,8 м.
При движении грузов угол φ1=A1C3D1 изменяется по закону φ1 = π2 (3 – t 2 ) , а угол φ2=A2C3D2 – по закону φ2 = π3 (t 2 + 1 ) . φ выражено в радианах, t – в секундах.
Считая грузы материальными точками, и пренебрегая всеми сопротивлениями, определить закон движения плиты x3=f3(t) и полной нормальной реакции направляющих N=f(t). x3 – координата центра C3 плиты.
Указания. Эта задача – на применение теоремы о движении центра масс. При этом для определения x3=f3(t) составить уравнение в проекции на горизонтальную ось x, а для определения N – на вертикальную ось y.
Решение
Дано: m1=3 кг, m2=6 кг, m3=10 кг, t0=0, r=0,4 м, R=0,8 м, φ1 = π2 (3 – t 2 ) , φ2 = π3 (t 2 + 1 ) .
Найти: x3=f3(t), N=f(t).
Рассмотрим механическую систему, состоящую из плиты и грузов D1 , D2 . Применим к ней теорему о движении центра масс:
(1.1) m ⋅ →aC = Σk →F ek .
Здесь →aC – ускорение центра масс системы; →F ek – внешние силы; m = m1 + m2 + m3 = 3 + 6 + 10 = 19 кг – масса системы.
Выберем неподвижную систему координат Oxy . Ее начало O выберем произвольно. Но чтобы ось Ox проходила через центр плиты C3 . Ускорение →aC в теореме о движении центра масс определяется именно в неподвижной системе.
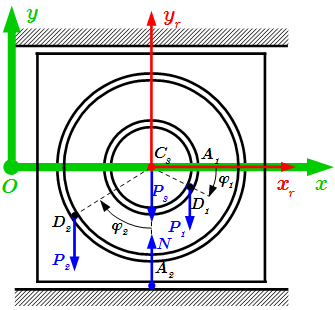
Рассмотрим внешние силы, действующие на систему. Это силы тяжести →P1 , →P2 грузов →D1 , →D2 ; сила тяжести →P3 плиты; и реакция направляющих →N . Силы тяжести направлены вертикально вниз. Будем считать, что реакция →N направлена вертикально вверх.
Кроме сил тяжести на грузы действуют силы реакции со стороны плиты и силы, приводящие грузы в движение. Но они не являются внешними. Точно такие же силы по величине, но обратные по направлению действуют на плиту со стороны грузов. Поэтому, при рассмотрении движения системы в целом, эти силы взаимно уничтожаются. В теорему о движении центра масс входят только внешние силы, действующие на элементы системы.
Спроектируем векторное уравнение (1.1) на оси системы координат Oxy .
m aCx = 0 ;
m aCy = N – P1 – P2 – P3 .
Выразим эти уравнения через компоненты радиус-вектора центра масс →rC = (xC , yC ) учитывая, что →aC = ..→rC :
(1.2) m ..xC = 0 ;
(1.3) m ..yC = N – P1 – P2 – P3 .
Определение закона движения плиты
Рассмотрим уравнение (1.2). Из него следует, что ускорение проекции центра масс на ось x равно нулю:
..xC = 0 .
Это простейшее дифференциальное уравнение второго порядка. Оно имеет решение
(1.4) xC = At + B ,
где A, B – постоянные, не зависящие от времени t величины.
По формуле (1) выразим x - координату центра масс системы через координаты грузов x1 , x2 и координату центра масс плиты x3 :
xC = 1m Σk mk xk = 1m (m1 x1 + m2 x2 + m3 x3 ) .
Подставляя в (1.4) находим:
(1.5) m1 x1 + m2 x2 + m3 x3 = m(At + B ) .
В условии задачи, нам заданы законы движения грузов относительно плиты, которая сама совершает движение. Поэтому выберем еще одну систему координат C3 xr yr , связанную с плитой. За начало отсчета возьмем центр плиты C3 . Оси C3 xr , C3 yr направим параллельно осям Ox, Oy .
Из векторного уравнения
→OD1 = →OC3 + →C3 D1
выражаем координаты (x1 , y1 ) точки D1 в неподвижной системе отсчета через координаты центра плиты C3 (x3 , 0 ) в неподвижной системе и координаты точки D1 (xr1 , yr1 ) в подвижной системе:
(1.6) x1 = x3 + xr1 , y1 = yr1 .
Аналогично для точки D2 :
(1.7) x2 = x3 + xr2 , y2 = yr2 .
Проектируя отрезки C3 D1 и C3 D2 на оси C3 xr , C3 yr , находим координаты грузов в подвижной системе координат.
xr1 = | C3 D1 | cos φ1 = r cos φ1 ;
(1.8) yr1 = – | C3 D1 | sin φ1 = – r sin φ1 ;
xr2 = – | C3 D2 | sin φ2 = – R sin φ2 ;
(1.9) yr2 = – | C3 D2 | cos φ2 = – R cos φ2 .
Здесь φ1 и φ2 являются заданными функциями от времени:
(1.10) φ1 = π2 (3 – t 2 ), φ2 = π3 (t 2 + 1 ) .
Подставляем полученные соотношения в (1.5), и выполняем преобразования.
m1 (x3 + xr1 ) + m2 (x3 + xr2 ) + m3 x3 = m(At + B ) ;
(m1 + m2 + m3 )x3 + m1 xr1 + m2 xr2 = m(At + B ) ;
mx3 + m1 r cos φ1 – m2 R sin φ2 = m(At + B ) ;
(1.11) x3 = At + B + 1m (m2 R sin φ2 – m1 r cos φ1 ) .
Постоянные A, B определим из условия, чтобы в начальный момент времени t = 0 , центр плиты находился в начале координат x3 = 0 , и чтобы скорость плиты равнялась нулю: .x3 = 0 .
Подставляем в (1.10) t = 0 .
φ1 (0 ) = π2 (3 – t 2 ) | t = 0 = π2 (3 – 0 2 ) = 3π2 ;
φ2 (0 ) = π3 (t 2 + 1 ) | t = 0 = π3 (0 2 + 1 ) = π3 .
Подставляем в (1.11) t = 0, x3 = 0 .
0 = A ⋅ 0 + B + 1m (m2 R sin φ2 (0 ) – m1 r cos φ1 (0 )) ;
0 = B + 1m ( m2 R sin π3 – m1 r cos 3π2 ) ;
0 = B + 1m ( m2 R √ 3 2 – m1 r ⋅ 0 ) ;
B = – 1m m2 R √ 3 2 = – 119 ⋅ 6 ⋅ 0, 8 ⋅ √ 3 2 = – 0, 2188 м .
Дифференцируем (1.11) по времени.
.φ1 = π2 (3 – t 2 ) ′t = π2 (0 – 2t ) = – πt ;
.φ2 = π3 (t 2 + 1 ) ′t = π3 (2t + 0 ) = 2π3 t ;
(sin φ2 ) ′t ≡ d sin φ2 dt = d sin φ2 dφ2 ⋅ dφ2 dt = cos φ2 ⋅ .φ2 = .φ2 cos φ2 ;
(cos φ1 ) ′t ≡ d cos φ1 dt = d cos φ1 dφ1 ⋅ dφ1 dt = – sin φ1 ⋅ .φ1 = – .φ1 sin φ1 ;
.x3 = A + 0 + 1m (m2 R(sin φ2 ) ′t – m1 r(cos φ1 ) ′t ) =
A + 1m (m2 R.φ2 cos φ2 + m1 r.φ1 sin φ1 ) .
Подставляем t = 0, .x3 = 0 .
.φ1 (0 ) = – π ⋅ 0 = 0 ;
.φ2 (0 ) = 2π3 ⋅ 0 = 0 ;
0 = A + 1m (m2 R.φ2 (0 ) cos φ2 (0 ) + m1 r.φ1 (0 ) sin φ1 (0 )) ;
0 = A + 1m (0 + 0 ) ;
A = 0 .
Окончательно имеем.
x3 = At + B + 1m (m2 R sin φ2 – m1 r cos φ1 ) =
0 ⋅ t – 0, 2188 + 119 (6 ⋅ 0, 8 sin φ2 – 3 ⋅ 0, 4 cos φ1 ) =
– 0, 2188 + 0, 2526 ⋅ sin ( π3 (t 2 + 1 ) ) – 0, 0632 ⋅ cos ( π2 (3 – t 2 ) ) .
Определение реакции направляющих
Из уравнения (1.3) находим:
(1.12) N = m ..yC + P ,
где P = P1 + P2 + P3 = m1 g + m2 g + m3 g = (m1 + m2 + m3 )g = mg =
19 ⋅ 9, 81 = 186, 4 Н .
По формуле (1) выражаем y - координату центра масс системы через координаты грузов y1 , y2 и координату центра масс плиты y3 :
yC = 1m Σk mk yk = 1m (m1 y1 + m2 y2 + m3 y3 ) .
Поскольку y3 = 0 , то
yC = 1m (m1 y1 + m2 y2 ) .
По формулам (1.6), (1.7), (1.8), (1.9), выражаем координату центра масс системы через углы φ1 , φ2 .
yC = 1m (m1 yr1 + m2 yr2 ) = 1m (– m1 r sin φ1 – m2 R cos φ2 ) .
Дифференцируем по времени.
.φ1 = π2 (3 – t 2 ) ′t = π2 (0 – 2t ) = – πt ;
..φ1 = (– πt ) ′t = – π ;
.φ2 = π3 (t 2 + 1 ) ′t = π3 ⋅ (2t + 0 ) = 2π3 t ;
..φ2 = 2π3 (t ) ′t = 2π3 ;
(sin φ1 ) ′t ≡ d sin φ1 dt = d sin φ1 dφ1 ⋅ dφ1 dt = cos φ1 ⋅ .φ1 = .φ1 cos φ1 ;
(cos φ1 ) ′t ≡ d cos φ1 dt = d cos φ1 dφ1 ⋅ dφ1 dt = – sin φ1 ⋅ .φ1 = – .φ1 sin φ1 ;
(sin φ1 ) ′′tt ≡ ((sin φ1 ) ′t ) ′t = (.φ1 cos φ1 ) ′t = ..φ1 cos φ1 + .φ1 (cos φ1 ) ′t =
..φ1 cos φ1 – .φ 21 sin φ1 ;
(cos φ1 ) ′′tt ≡ ((cos φ1 ) ′t ) ′t = – (.φ1 sin φ1 ) ′t = – ..φ1 sin φ1 – .φ1 (sin φ1 ) ′t =
– ..φ1 sin φ1 – .φ 21 cos φ1 ;
(sin φ2 ) ′′tt = ..φ2 cos φ2 – .φ 22 sin φ2 ;
(cos φ2 ) ′′tt = – ..φ2 sin φ2 – .φ 22 cos φ2 ;
m..yC = – m1 r(sin φ1 ) ′′tt – m2 R(cos φ2 ) ′′tt =
– m1 r(..φ1 cos φ1 – .φ 21 sin φ1 ) – m2 R(– ..φ2 sin φ2 – .φ 22 cos φ2 ) .
Подставим в (1.12) и преобразуем окончательно.
N = m ..yC + P = P – m1 r(..φ1 cos φ1 – .φ 21 sin φ1 ) – m2 R(– ..φ2 sin φ2 – .φ 22 cos φ2 ) =
P + m1 r(π cos φ1 + π 2 t 2 sin φ1 ) + m2 R( 2π3 sin φ2 + ( 2πt3 ) 2 cos φ2 ) =
186, 4 + 3 ⋅ 0, 4(π cos φ1 + π 2 t 2 sin φ1 ) + 6 ⋅ 0, 8( 2π3 sin φ2 + ( 2πt3 ) 2 cos φ2 ) =
186, 4 + 3, 8 ⋅ cos φ1 + 11, 8 ⋅ t 2 sin φ1 + 10, 1 ⋅ sin φ2 + 21, 1 ⋅ t 2 cos φ2 .
Ответ
x3 = – 0, 2188 – 0, 0632 ⋅ cos φ1 + 0, 2526 ⋅ sin φ2 ;
N = 186, 4 + 3, 8 ⋅ cos φ1 + 11, 8 ⋅ t 2 sin φ1 + 10, 1 ⋅ sin φ2 + 21, 1 ⋅ t 2 cos φ2 ;
φ1 = π2 (3 – t 2 ), φ2 = π3 (t 2 + 1 ) .
Здесь x3 выражено в метрах; N – в Ньютонах; t – в секундах.
Задача. Определение реакции в кривошипно-шатунном механизме
Условие задачи
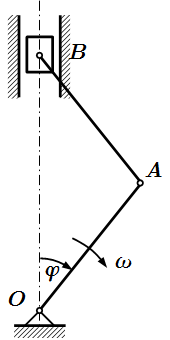
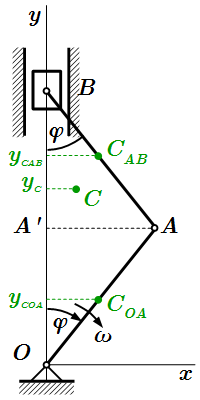
В кривошипно-шатунном механизме кривошип OA и шатун AB представляют собой однородные стержни массой m1 и длиной l . Ползун B массой m2 движется в вертикальных направляющих. Определить вертикальную составляющую реакции шарнира O в функции угла φ , если кривошип вращается с постоянной угловой скоростью ω . Трением в направляющих ползуна пренебречь.
Решение
Дано: m1 , m2 , |OA| = |AB| = l , ω .
Найти: Ny(φ) .
Рассмотрим механическую систему, состоящую из кривошипа OA, шатуна AB и ползуна B. Применим к ней теорему о движении центра масс:
(2.1) m ⋅ →aC = Σk →F ek .
Здесь →aC – ускорение центра масс системы; →F ek – внешние силы; m = mOA + mAB + mB = m1 + m1 + m2 = 2m1 + m2 – масса системы.
Выберем систему координат Oxy с началом в шарнире O . Ось Oy направим вдоль направляющих ползуна.
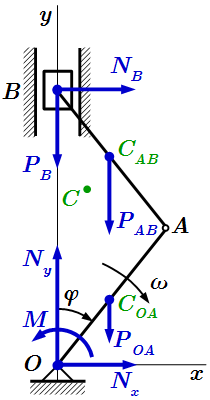
Рассмотрим внешние силы, действующие на систему. Это момент сил M , действующий на кривошип, поддерживающий угловую скорость ω постоянной; силы тяжести →POA = m1 →g, →PAB = m1 →g, →PB = m2 →g кривошипа, шатуна и ползуна, направленные вертикально вниз, противоположно оси Oy ; сила реакции →N шарнира O ; сила реакции →NB направляющих. Поскольку трением в направляющих можно пренебречь, то сила →NB направлена перпендикулярно направляющим, то есть перпендикулярно оси Oy . Силу реакции →N разложим на составляющие →Nx , →Ny вдоль осей координат.
Подставим действовавшие на нашу систему силы в уравнение движения центра масс (2.1). m ⋅ →aC = →POA + →PAB + →PB + →Nx + →Ny + →NB .
Спроектируем это векторное уравнение на ось Oy .
m aCy = – POA – PAB – PB + 0 + Ny + 0 ;
m aCy = – m1 g – m1 g – m2 g – Ny = Ny – mg .
Выразим ускорение центра масс через компоненты радиус-вектора центра масс →rC (xC , yC ) .
→aC = (aCx , aCy ) = ..→rC = (..xC , ..yc ) ;
m..yC = Ny – mg .
Отсюда
(2.2) Ny = m(g + ..yC ) .
Компоненту yC радиус-вектора центра масс системы определим по формуле (1).
yC = 1m (mOA yCOA + mAB yCAB + mB yB ) =
1m (m1 yCOA + m1 yCAB + m2 yB ) ;
(2.3) yC = 1m (m1 (yCOA + yCAB ) + m2 yB ) .
Здесь COA , CAB – центры масс кривошипа и шатуна; yCOA , yCAB – их y - координаты. Ползун B мы считаем материальной точкой.
Поскольку кривошип OA и шатун AB являются однородными стержнями, то их центры масс COA , CAB делят стержни пополам.
| OCOA | = | COA A | , | ACAB | = | CAB B | .
Из геометрии находим y - координаты центров масс тел.
yCOA = | OCOA | cos φ = 12 | OA | cos φ = 12 l cos φ ;
yB = | OB | = | OA ′ | + | A ′B | = | OA | cos φ + | AB | cos φ = l cos φ + l cos φ = 2l cos φ ;
yCAB = | OB | – | CAB B | cos φ = | OB | – 12 | AB | cos φ = 2l cos φ – 12 l cos φ = 32 l cos φ .
Подставляем в (2.3).
myC = m1 (yCOA + yCAB ) + m2 yB = m1 ( 12 l cos φ + 32 l cos φ ) + m2 2l cos φ =
2m1 cos φ + 2m2 l cos φ = 2(m1 + m2 )l cos φ ;
(2.4) myC = 2(m1 + m2 )l cos φ .
Дифференцируем (2.4) по времени учитывая, что угловая скорость ω = .φ является постоянной.
d cos φdt = d cos φdφ ⋅ dφdt = – sin φ ⋅ ω = – ω sin φ ;
d sin φdt = d sin φdφ ⋅ dφdt = cos φ ⋅ ω = ω cos φ ;
m.yC = 2(m1 + m2 )l d cos φdt = – 2ω(m1 + m2 )l sin φ ;
m..yC = – 2ω(m1 + m2 )l d sin φdt = – 2ω 2 (m1 + m2 )l cos φ .
Отсюда находим вторую производную по времени y - координаты центра масс системы.
..yC = – 2(m1 + m2 )m ω 2 l cos φ .
Подставляя в (2.2), находим искомую вертикальную составляющую реакции шарнира.
Ny = m(g + ..yC ) = mg – 2(m1 + m2 )ω 2 l cos φ .
Ответ
Ny = (2m1 + m2 )g – 2(m1 + m2 )ω 2 l cos φ .
Автор: Олег Одинцов. Опубликовано: